Me En 537: Robotics
In this course, I learned about the fundamentals of robotics, including forward and inverse kinematics, trajectory planning, dynamics, and control. The course was mainly focused on the mathematical modeling of robotic systems, but we also had a lab component where we implemented some of the concepts using a robotic arm. The majority of the modeling and mathematics was done using Python libraries like SymPy and NumPy, and we used ROS2 for the lab component.
Procedure Applied:
- Modeled robotic kinematics and dynamics using sympy and numpy.
- Implemented trajectory planning algorithms.
- Developed control strategies and tested them on a robotic arm using ROS2.
Skills Applied:
- Python (NumPy, matplotlib, scipy.stats)
- ROS2
- Robotic kinematics and dynamics
Key Outcomes:
- Developed and tested robotic models and control algorithms.
- Gained hands-on experience with ROS2 and robotic arm manipulation.
Gallery:
A simulation of a 2D robot arm performing inverse kinematics to reach a goal
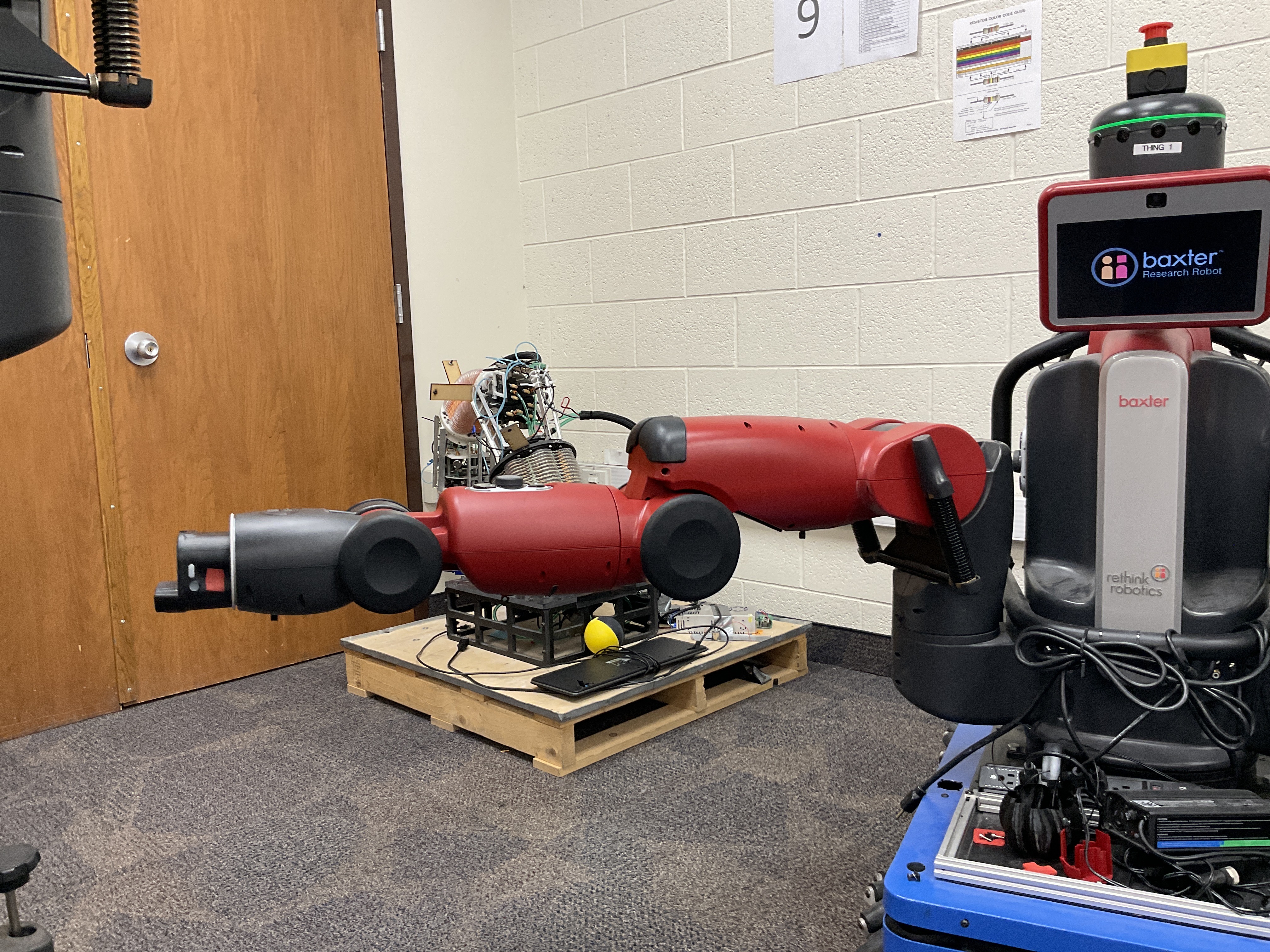
Photo of the Co-Robot Baxter that we used in the lab. Using this robot, we praticed defining DH parameters, control, and path planning
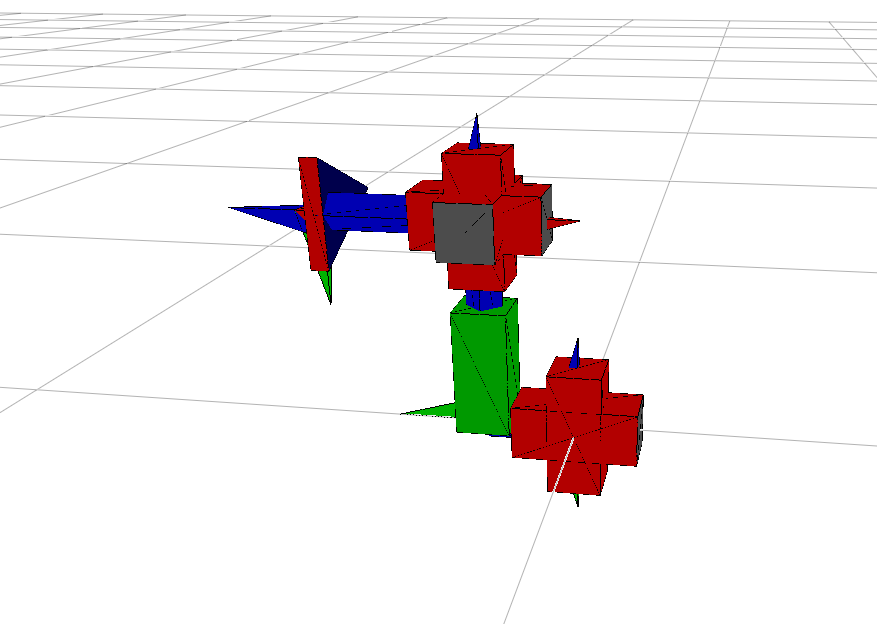
A screenshot of the simulation interface that we used to control robotic arms