Me En 431: Design of Control Systems
During my senior year, I had the opportunity to take a course on control systems design. The course was comprised of a series of case studies as well as a physical lab. For each of these case studies, we modeled its behavior using Lagrangian Dynamics, controlled it using both PID and state space controllers, all using tools in python like sympy and numpy.
Procedure Applied:
- Modeled dynamic systems using Lagrangian mechanics and derived equations of motion.
- Designed and tuned PID controllers for various system responses.
- Implemented state space controllers and observers for state estimation.
Skills Applied:
- Python (Sympy, NumPy, Matplotlib)
- Lagrangian Dynamics and differential-equation-based simulation
- State space modeling and observer design
- Experimental validation and data analysis
Key Outcomes:
- Developed and validated PID and state space controllers for various dynamic systems.
- Gained hands-on experience with control system implementation and testing.
Gallery:
Simulation of a 2D drone position controller
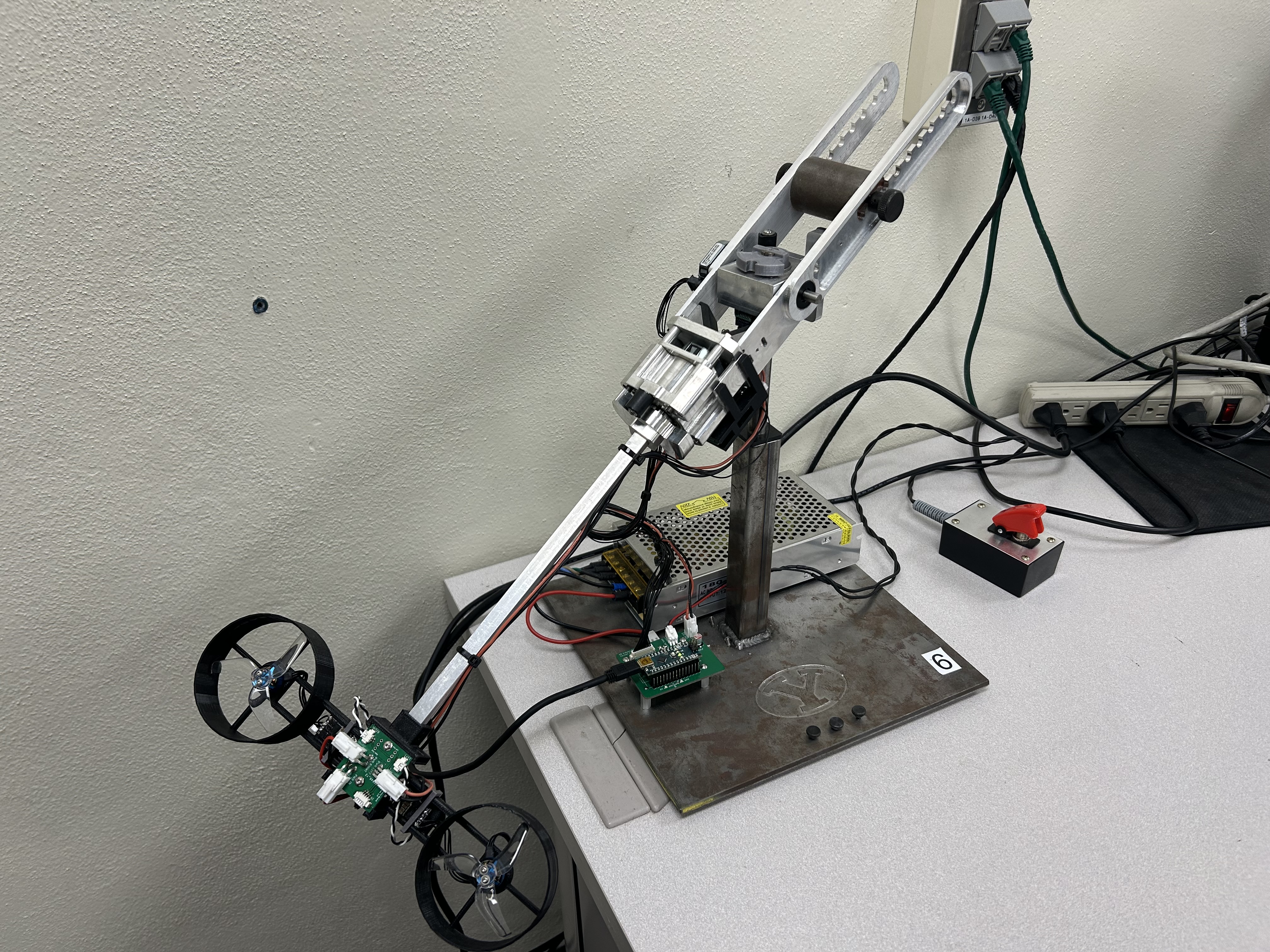
Hummingbird-drone lab setup
Simulation of a controlled inverted pendulum