Personal Projects
Cycloidal Drive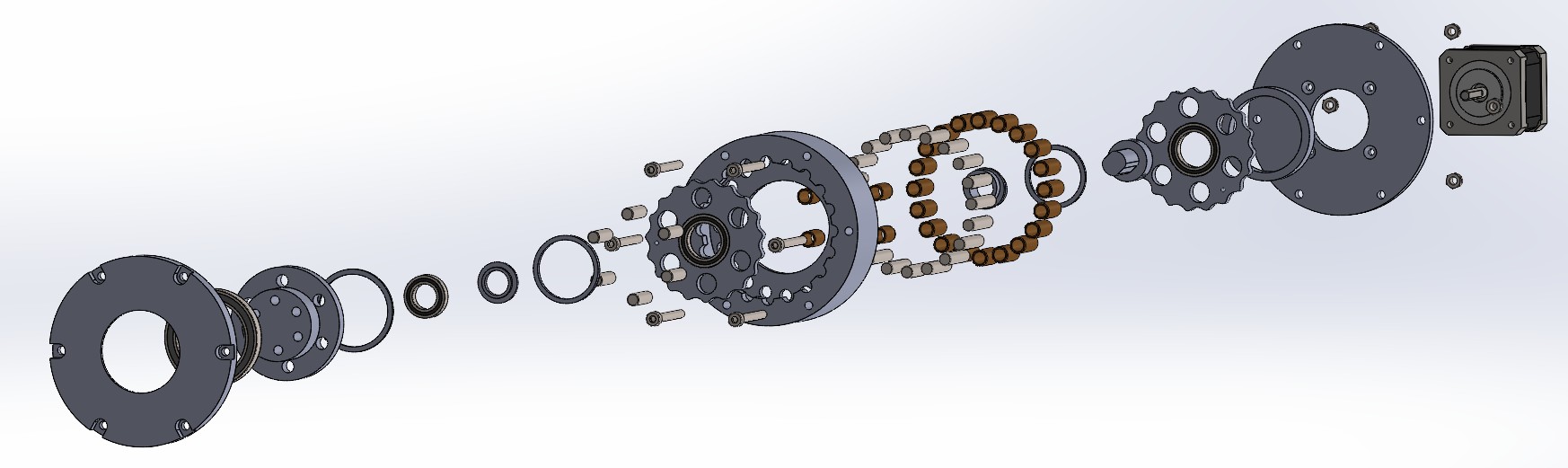


I built a cycloidal drive gearbox using 3D printed parts and off the shelf components. The gearbox has a reduction ratio of 25:1 and is capable of handling high torque.
Balancing Robot (In Progress)
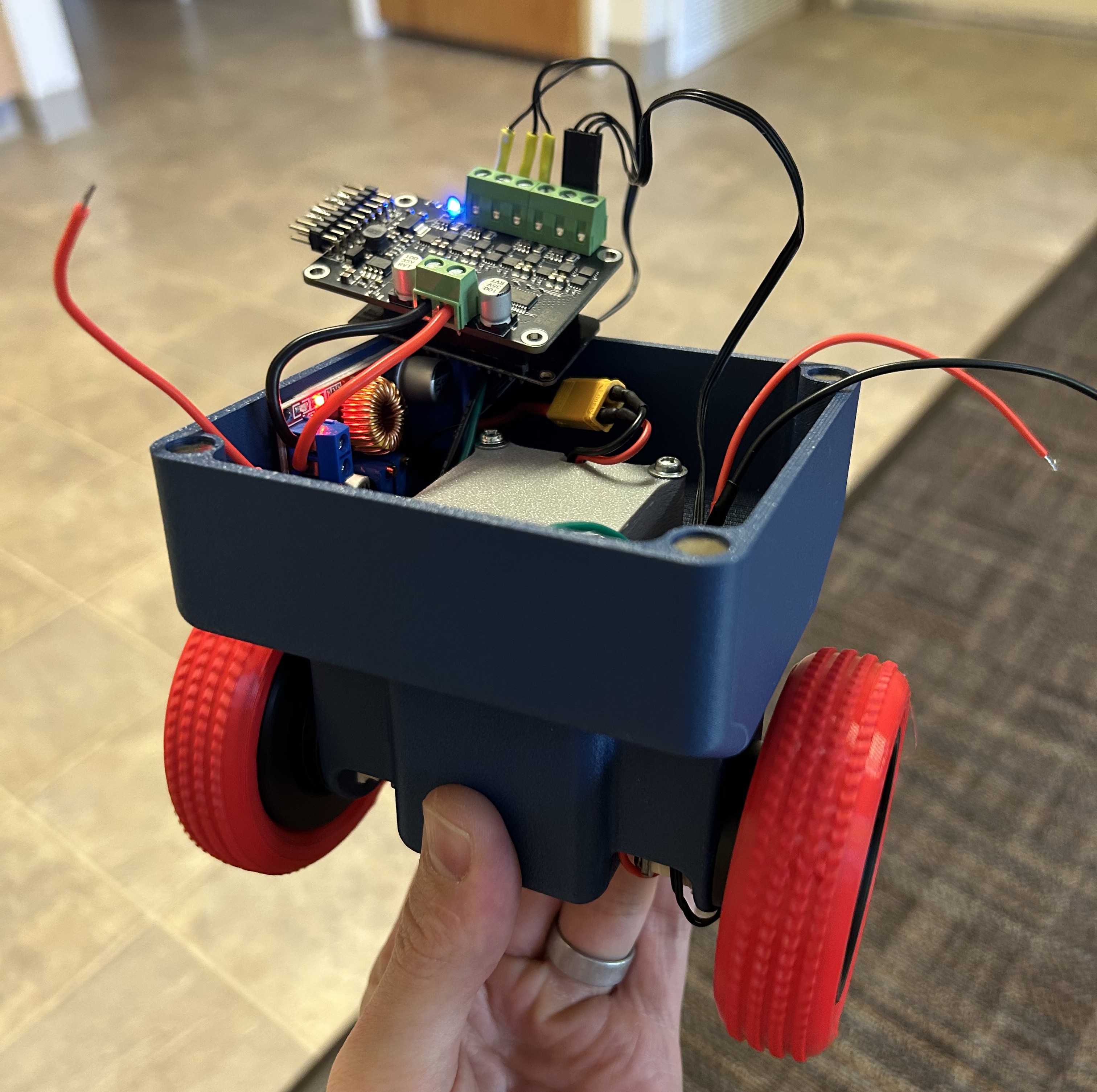
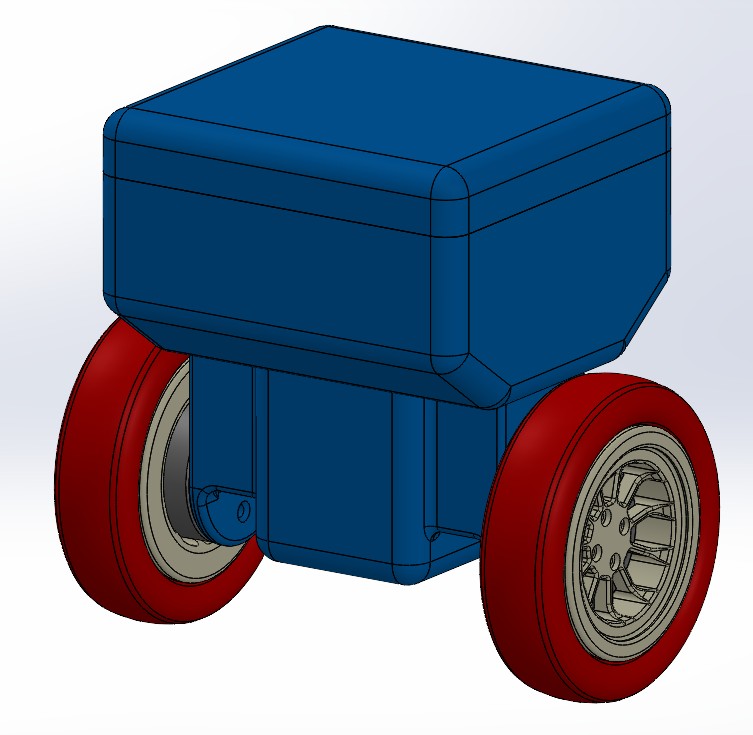
This is a project that I am currently working on. The goal is to build a self-balancing robot using an ESP32 microcontroller. It uses a combination of gyroscope and accelerometer data to determine its orientation and drives two brushless DC motors to maintain balance. The motor driver and control system use FOC (Field Oriented Control) and PID algorithms to achieve smooth motor control and stability. I built the battery using 18650 lithium-ion cells and a BMS (Battery Management System) to ensure safe operation. Currently, I'm running into issues with the magnetic motor position encoders, which are interfering with proper motor control.
Custom Split Mechanical Keyboard

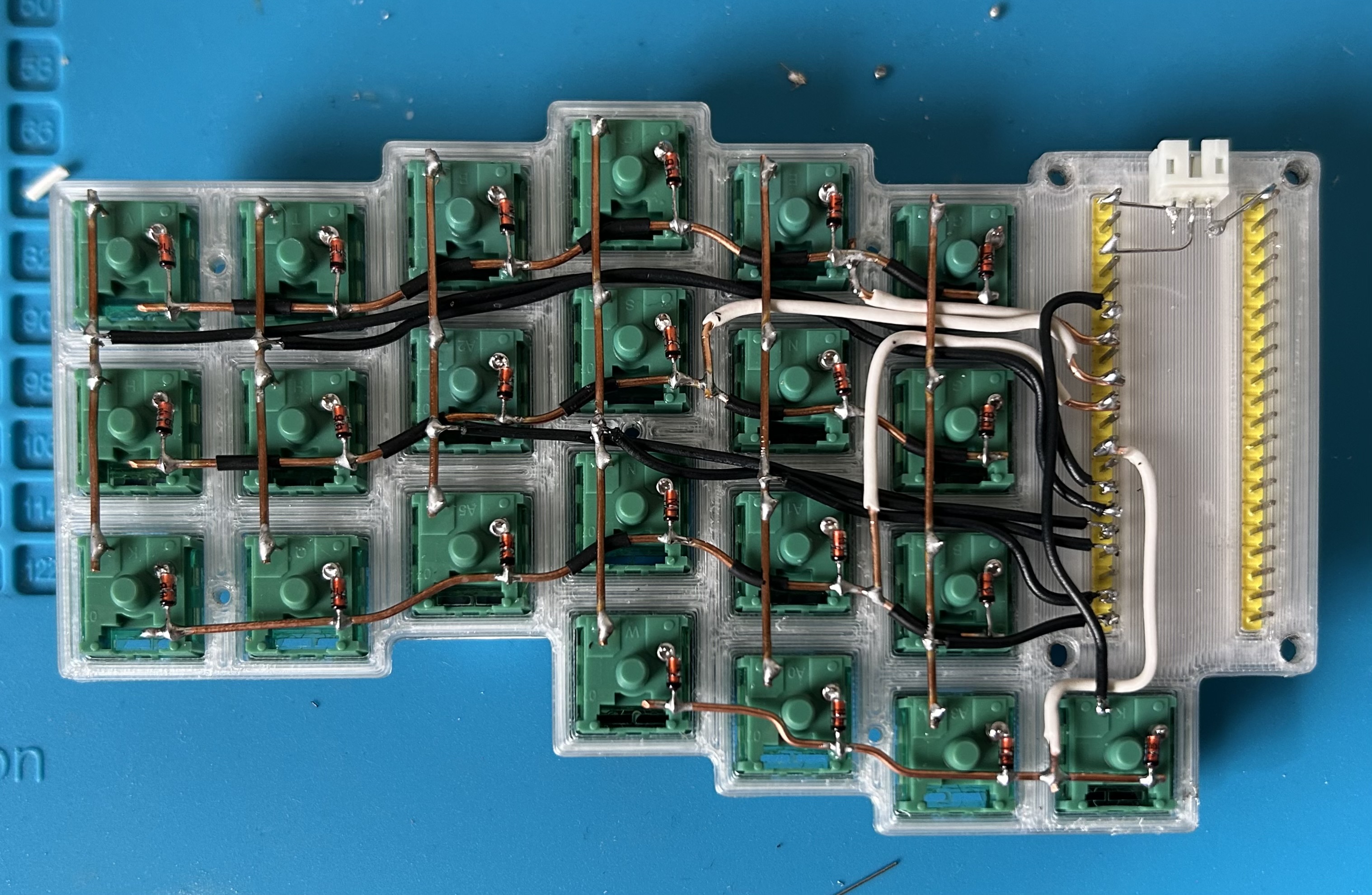
I designed and built a custom split mechanical keyboard using a hand-soldered logic matrix and an RP2040 microcontroller. The base is laser-cut and the key-plate is 3D printed. The keyboard features a QMK firmware implementation that allows for custom key mappings and macros. The project was based on the Scotto44 keyboard design.
This Website

I learned the basics of web development and built this personal website using HTML, CSS, and Jekyll. The site is hosted on GitHub Pages and the source code is available in this GitHub repository.